Un mulo robot adatto per la montagna, resistente e agile, in grado di muoversi su terreni impervi, trasportare carichi pesanti e andare al trotto: al centro di un accordo di collaborazione tra Università di Trento e Istituto Italiano di Tecnologia di Genova, ora è stato trasferito da Genova all’Università di Trento dove verrà studiato per i prossimi tre anni.
Non segnerà la fine immediata dello sfruttamento degli animali nel trasporto di carichi pesanti su terreni accidentati, ma il robot quadrupede HyQ-Blue (Hydraulic Quadruped) apre senza dubbio le porte a scenari promettenti.
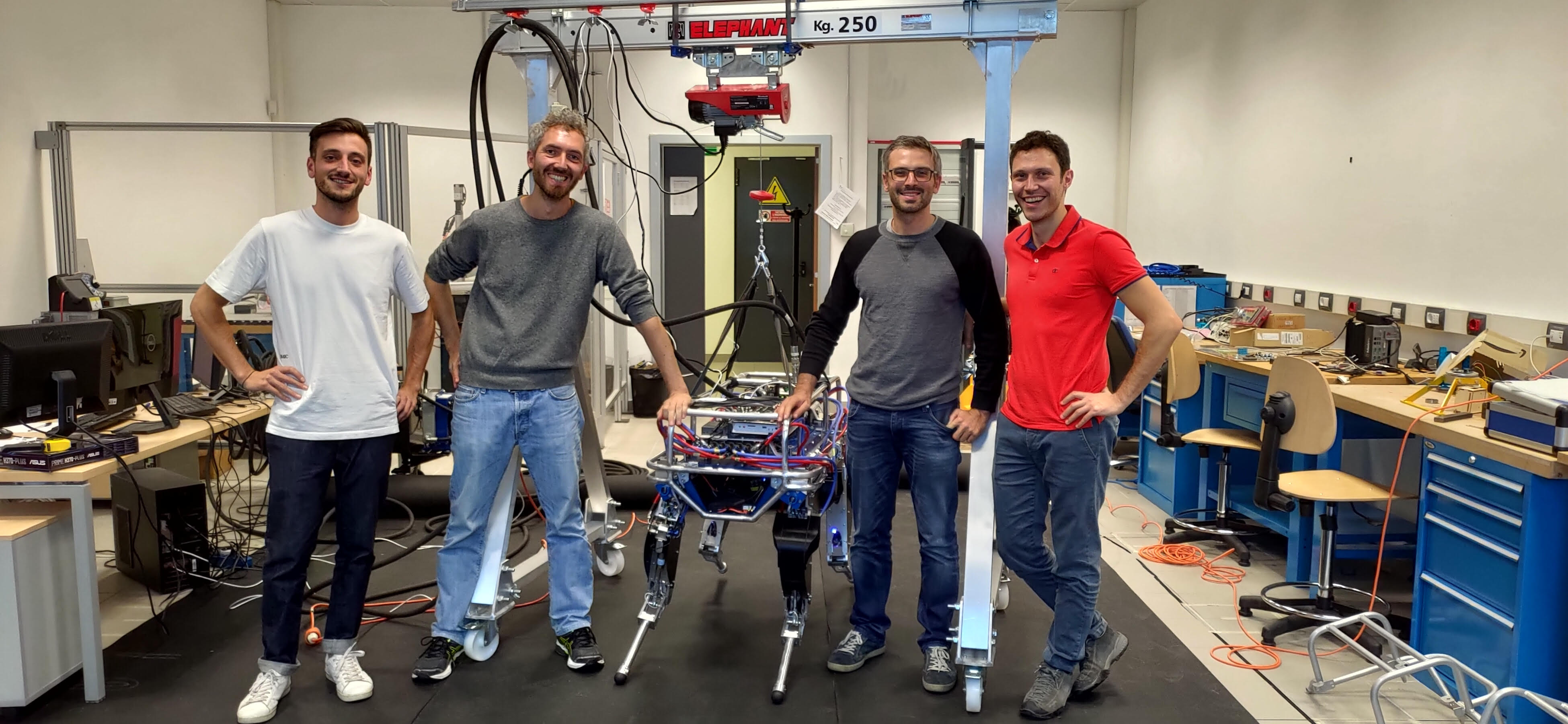 Nella foto da sinistra a destra:
Nella foto da sinistra a destra:
Gianluigi Grandesso, Andrea Del Prete, Michele Focchi, Gastone Rosati Papini con HyQ-Blue robot al centro.
L’idea della collaborazione e del comodato d’uso nasce dagli ottimi rapporti tra le due istituzioni e dall’impegno congiunto tra il ricercatore IIT Michele Focchi e Andrea Del Prete, in passato ricercatore IIT, ora ricercatore al Dipartimento di Ingegneria industriale dell’Università di Trento.
L’obiettivo a lungo termine del progetto è creare software, algoritmi e hardware robusti per robot quadrupedi che riescano ad accedere a zone impervie caratterizzate da terreni accidentati e che possano intervenire, quindi, in caso di catastrofi naturali, nelle ispezioni di luoghi inaccessibili all’uomo e a supporto di attività gravose in montagna e nell’ambito agricolo.
Una delle prime sfide è il controllo della locomozione.
«Cercheremo di migliorare ulteriormente le capacità di HyQ–Blue per avvicinarci sempre più a delle prestazioni necessarie per applicazioni reali – dichiara Andrea Del Prete, responsabile scientifico dell’accordo per l’Ateneo di Trento – Useremo algoritmi di apprendimento automatico per velocizzare le tecniche di controllo del robot basate su ottimizzazione numerica e quindi migliorare le sue capacità di reazione ai disturbi e agli imprevisti. Inoltre, il robot sarà usato come piattaforma di validazione degli algoritmi di controllo sviluppati nelle attività di ricerca del Dipartimento».
«Nel contesto trentino – spiega Michele Focchi, ricercatore IIT – questo robot potrebbe trovare applicazioni per attività in montagna, come ad esempio il trasporto di oggetti pesanti su sentieri estremamente accidentati, dove i robot con ruote o cingoli non riescono a muoversi o in condizioni ambientali e climatiche sfavorevoli a supporto del soccorso alpino».
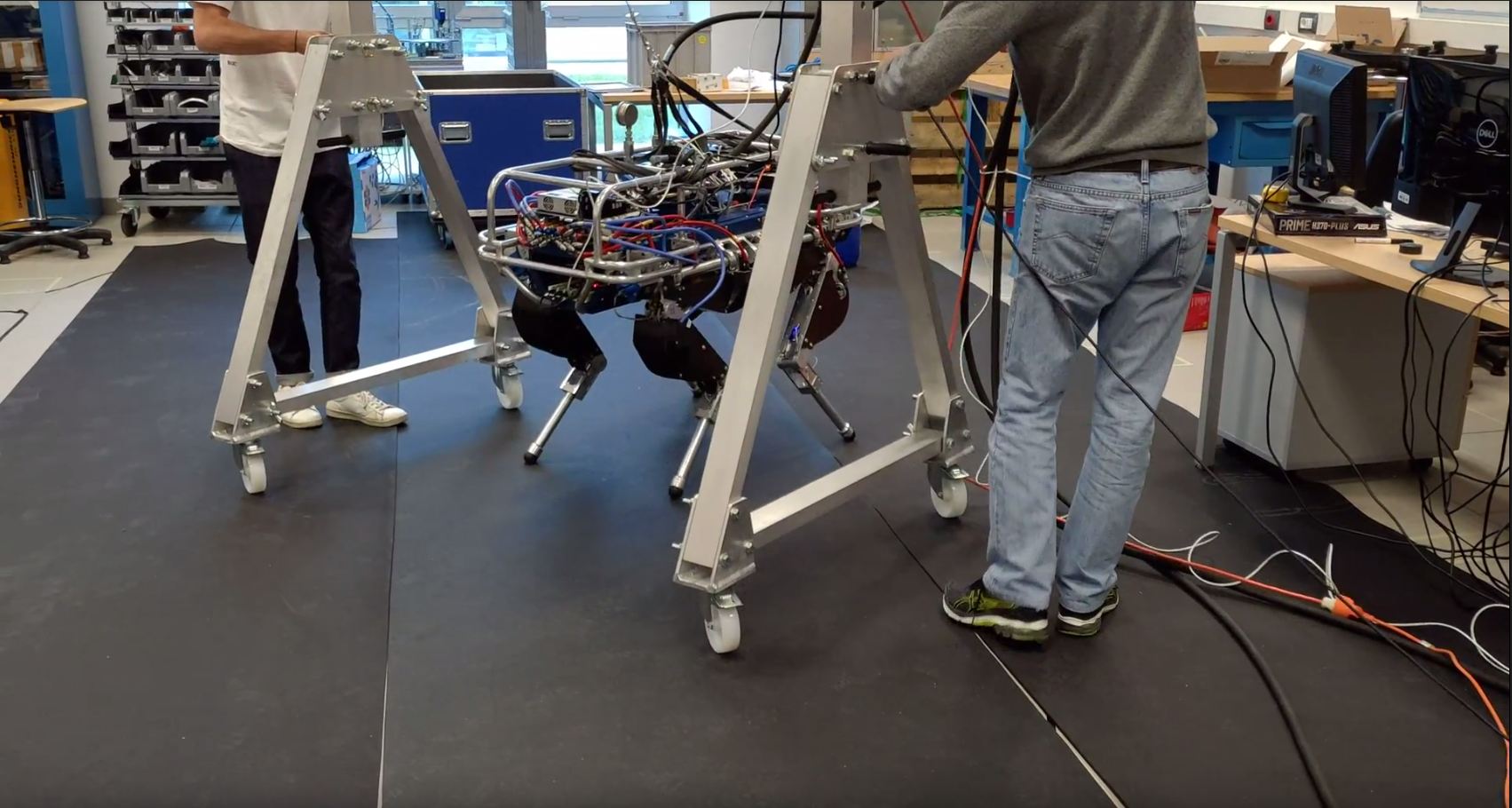
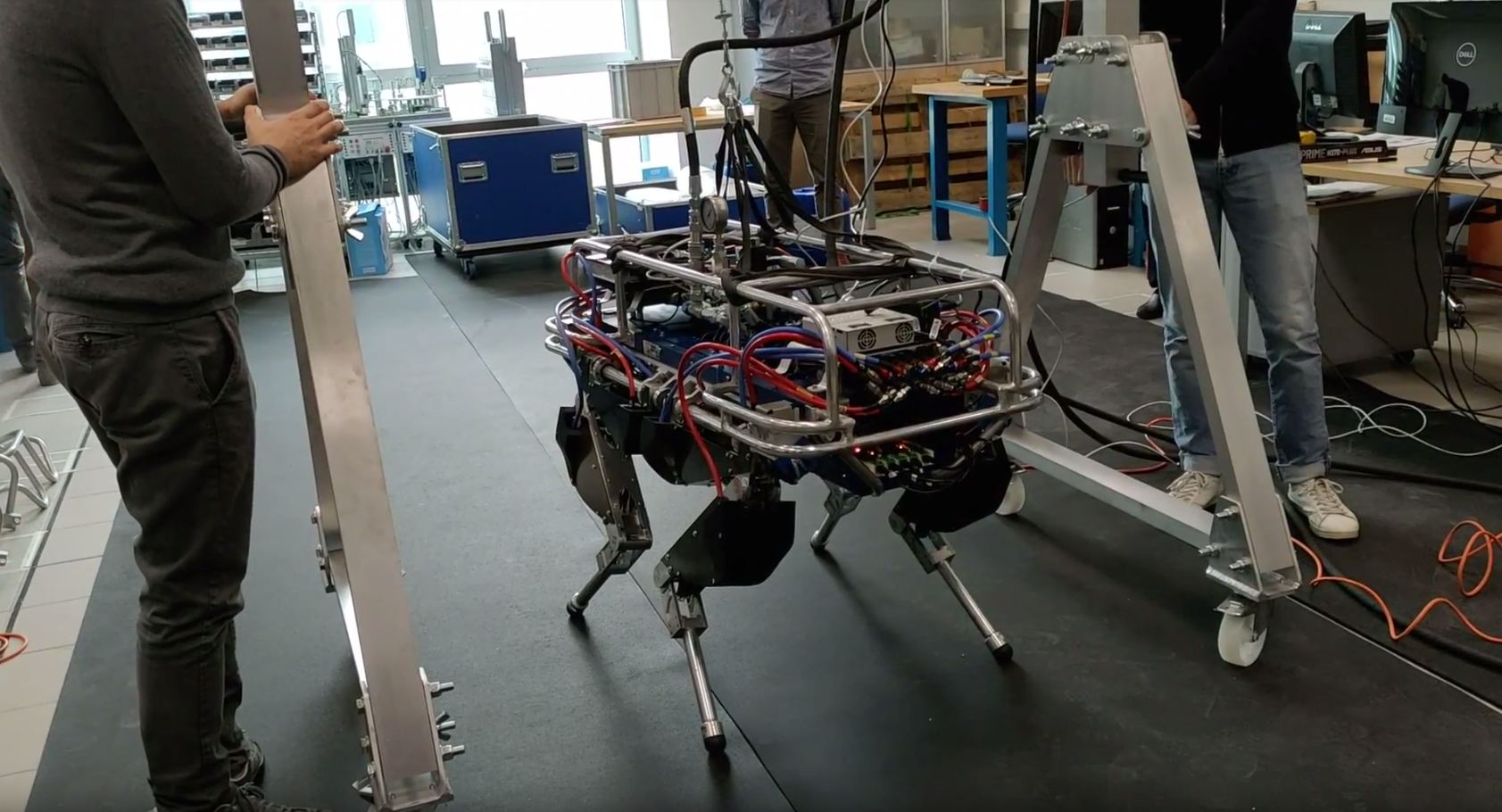
Progettato e costruito all’Istituto Italiano di Tecnologia di Genova, nel laboratorio Dynamic Legged Systems, diretto da Claudio Semini, HyQ-Blue fa parte della serie di robot animaloidi HyQ azionati idraulicamente (non elettrici), sviluppati dai ricercatori dell’IIT a partire dal 2007 traendo ispirazione dalla natura. Il design del robot è stato pensato, infatti, ispirandosi per dimensioni e forza, ad animali estremamente resistenti e in grado di muoversi su ogni tipo di terreno.
HyQ-Blue pesa 90 chili, è lungo 1 metro, ha il corpo in lega di alluminio, è capace di camminare, trottare, salire e scendere scale, portare e trainare pesi, proprio come farebbero i muli degli Alpini. Grazie agli attuatori idraulici HyQ è uno dei pochi robot quadrupedi al mondo che riesce a compiere movimenti veloci e precisi nello stesso tempo. Oltre a sensori di posizione che gli permettono di posizionare accuratamente le zampe, possiede anche sensori di equilibrio (inerziali) e di forza che gli permettono di percepire la forza esercitata sul terreno e all’occorrenza camminare con passo “felpato”. Inoltre HyQ-Blue è in grado di acquisire e costruire in tempo reale una mappa tridimensionale dell’ambiente che lo circonda, ciò gli permette di avere un alto grado di autonomia nell’evitare ostacoli e nel selezionare dove mettere le zampe proprio come farebbe un animale vero. Per quanto riguarda invece i comandi di più alto livello (come andare avanti/indietro, di lato, ruotare sul posto, alzarsi/abbassarsi) HyQ è teleoperato via wireless tramite un “joypad” da un operatore esterno a cui il quadruede è in grado di inviare la mappa dell’ambiente in cui si trova e le immagini acquisite dalle telecamere di cui è equipaggiato.
L’Accordo tra Università di Trento e Istituto italiano di tecnologia
Lo sviluppo del robot quadrupede HyQ-Blue rientra nell’accordo tra Università di Trento e Istituto Italiano di Tecnologia. Oggetto dell’accordo, della durata di tre anni, è l’esecuzione di attività di ricerca congiunte nell’ambito della “legged robots”, area della robotica che si occupa di robot che camminano, dotati di gambe e di zampe, che imitano persone, animali e insetti.
Le fasi operative del programma congiunto prevedono il setup del laboratorio per HyQ-Blue robot, miglioramento del software di controllo e sensoristica del robot, miglioramento del software per la locomozione, studio di algoritmi di locomozione per terreni accidentati e terreni deformabili e per traiettorie di salto dei robot quadrupedi.
Responsabile scientifico per UniTrento è Andrea Del Prete, per la fondazione Istituto Italiano di Tecnologia è Claudio Semini.
Le attività svolte per HyQ-Blue robot sono legate inoltre al progetto europeo (H2020) Memmo, al quale Andrea Del Prete partecipa assieme allo studente di dottorato Luca Olivieri e che coinvolge una serie di istituzioni (oltre all’Università di Trento, Max-Planck Institute, Università di Oxford ed Edimburgo, IDIAP e LAAS/CNRS di Tolosa che è il coordinatore).